
The JOCMS-2011 research cruise is operating from the R\V Thomas G. Thompson, a 274-foot long research vessel operated by the School of Oceanography, University of Washington. The survey is being conducted in the central western Pacific Ocean, ~3600 km west of Honolulu and has three foci: near-bottom magnetic measurements, conventional shipboard geophysical measurements, and a seismic reflection and refraction survey.
Near-bottom Magnetics
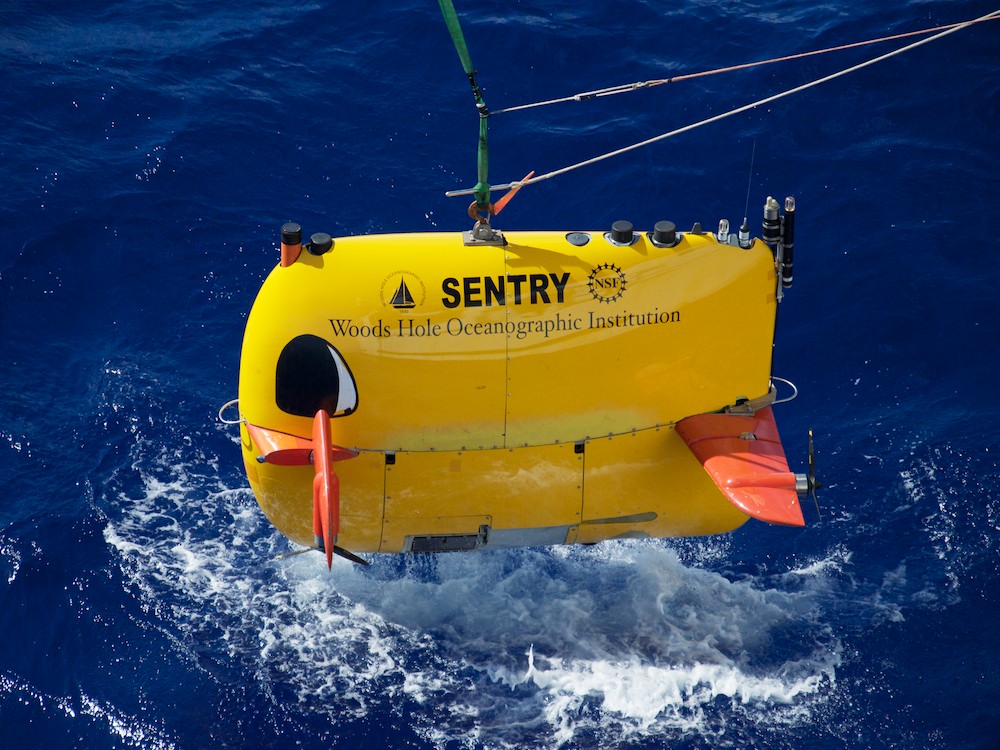
The AUV-Sentry (Credit: Will Koeppen)
Previous magnetic surveys used a magnetometer towed along the ocean surface. However, those surveys found it difficult to resolve individual magnetic anomalies in the Jurassic-aged seafloor because of the extreme water depth (>5 km). To overcome this issue, we are making magnetic measurements using an autonomous underwater vehicle, the AUV-Sentry. The Sentry contains a sensitive magnetometer (among other instruments), and operates ~100 meters above the seafloor, ~5 km below the ocean surface. At this depth, the Sentry's magnetometer can record a much stronger signal than we can record at the sea surface. However, the AUV-Sentry can't remain underwater indefinitely. It can take up to 4 hours for the AUV-Sentry to be deployed and descend to the ocean bottom, and it has enough battery power to take magnetic measurements for about 24 hours. It takes another 4 hours to ascend to the surface, and 16 hours onboard the ship to recharge its batteries.
While the AUV-Sentry is operating on its, own using its own navigational instruments and software, the scientists on the ship are taking concurrent measurements using a towed magnetometer, the MISO-TowCam. The TowCam data will provide a second magnetic profile, parallel to the profile measured by the AUV-Sentry.
Shipboard Geophysical Measurements
Throughout the trip, we are collecting sea surface magnetic and gravity data, and sonar and multi-beam bathymetry measurements. These are typical measurements made during any ocean-going scientific survey, and they add to our overall knowledge of the ocean floor.
Seismic Reflection and Refraction
While the batteries of the AUV-Sentry recharge, we are collecting seismic reflection and refraction data to image the geologic structure of seafloor's subsurface (5–10 km below the seafloor). This is important because we need to determine if and how the Jurassic seafloor has been modified by more recent volcanism or tectonics. For example, if the Jurassic seafloor is covered by Cretaceous submarine lava flows, it will affect our magnetic measurements.
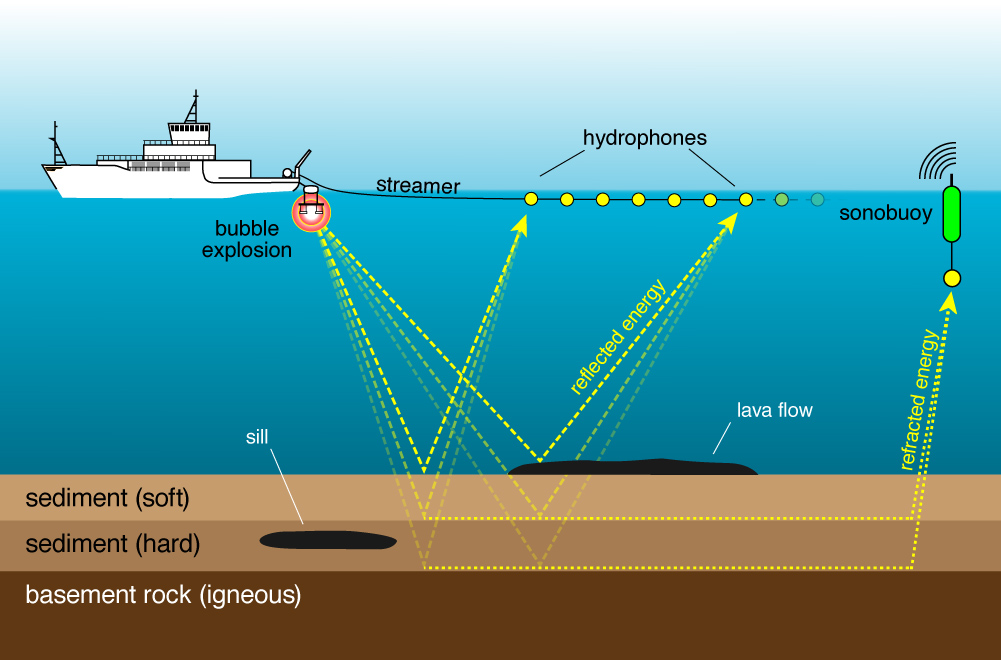
Diagram of the JOCMS-2011 seismic setup
For seismic reflection measurements, we use the Scripps multi-channel seismic system to generate images of the seafloor's subsurface. The system consists of a 600-meter long streamer strung with 48 hydrophones. The streamer is laid out behind the ship and a seismic signal is generated using a pair of generated injection air guns. The expansion of the air bubbles creates a pressure wave that travels through the water, reflects off of layers of sediment and rock within the seafloor, and returns to be recorded by the hydrophones. If the wave arrives at the same hydrophone multiple times, subsurface layers must be present. Using our configuration, we expect to see stratigraphy, sills, the igneous basement, and perhaps even volcanic structures within the basement.
For seismic refraction measurements we deploy sonobuoys, expendable buoys that can record the sound of the air guns up to 30 km from the ship. These are necessary because Cretaceous lava flows and/or sills are sonically very reflective, meaning that only a small amount of energy from each air gun shot is transferred to deeper layers. This can, for example, lead to a Cretaceous-aged subsurface sill being falsely identified as Jurassic basement. In contrast to reflection data, the sonobuoys record the energy that travels along the Jurassic basement, and they allow us to generate a much deeper image of the seafloor's subsurface.